





免费会员 经销商
参考价:
起订量:
-
- ¥13
- ≥1 台
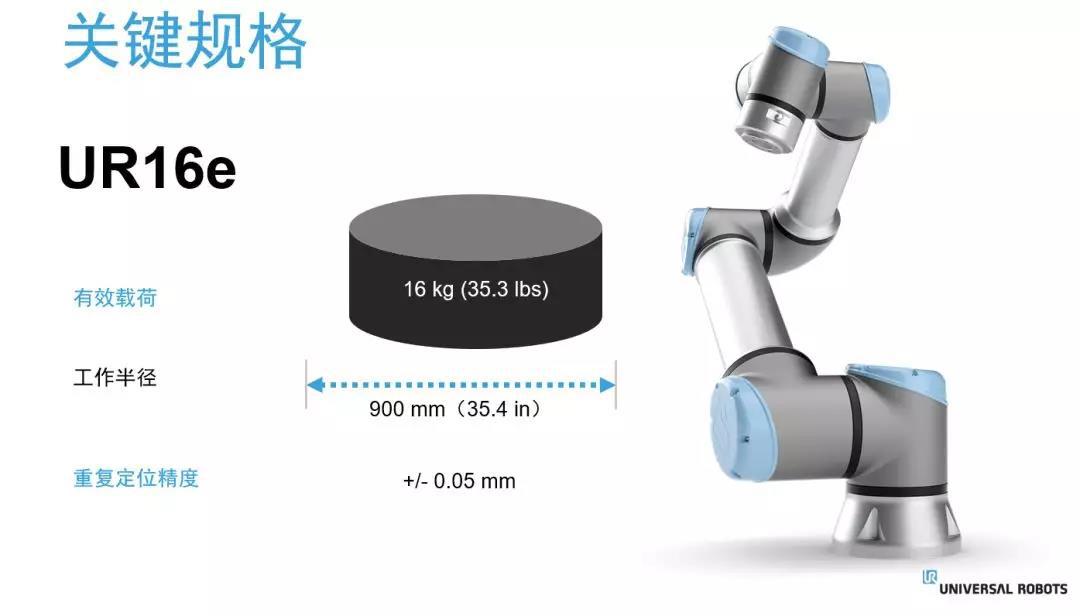
ur机器人 协作机械臂高校实验室建设 优傲机器人+夹爪-装配机器人
具体成交价以合同协议为准
2020-07-20东莞市
- 型号
- ur机器人
该企业相似产品





产品简介
优傲机械手臂几乎可以让一切工作实现自动化;从组装到喷漆,从拧螺丝到贴标签,从包装到抛光,从注塑成型到焊接,所有您能想到的全部应用。优傲系列所具备的灵活性,令机械手臂实现了经济可行的小批量、多组合的产品组装。协作机械臂高校实验室建设 优傲机器人+夹爪
详细信息
协作机械臂高校实验室建设方案:
出于安全性、开源、接口丰富等优点的考虑,我们采用协作机械臂来构建该实验室,提供基于ROS系统的开源功能包,可展开关于机械臂动力学和运动学的研究、机械臂运动轨迹规划的优化问题的研究、机械臂结合夹爪的抓取控制的研究、双臂协同运动控制的研究等。
ROS是开源的,用于机器人开发的一种后操作系统。它提供类似操作系统所提供的功能,包含硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间的消息传递、程序发行包管理,同时也提供一些工具程序和库用于获取、建立、编写和运行多机整合的程序。
ROS的运行架构是一种使用ROS通信模块实现模块间P2P的松耦合的网络连接的处理架构,它执行若干种类型的通讯,包括基于服务的同步RPC(远程过程调用)通讯、基于Topic的异步数据流通讯,还有参数服务器上的数据存储。
协作机械臂高校实验室建设特点:
点对点设计(降低数据计算压力,适应多机器人系统)
多语言支持(C++、Python、Octave和LISP等)
精简和集成(模块化设计,代码可单独编译;利用开源项目代码)
工具包丰富
免费及开源
协作机械臂选型:



协作机械臂高校实验室建设目的:
构建以机械臂为主体的研究实验室,含括单臂、双臂、传感器等设备,方便师生展开关于机械臂相关的课题研究,基本满足绝大多数的研究需求。同时,也可基于此展开关于机械臂的操作、简易串口通讯、ROS系统、MoveIt轨迹规划等课程实验的教学任务,完善机器人学科的建设工作。
我司作为UR协作机器人和mir机器人优选经销商,为您提供更多机器人自动化解决方案。
公司销售商品: 优傲协作机器人 | MiR自主移动机器人,激光导航AGV小车 |台达SCARA机器人 四轴机器人 | robotiq夹爪 | robotiq真空吸盘|robotiq腕部相机|onrobot夹爪 | QB softhand软体五指灵巧手|pickit 机器人3D视觉 |所罗门3D视觉|复合机器人(AGV+机械臂)|scara螺丝机|紫外线消毒机器人
应用场景:汽车制造行业 | 3C行业 | 电子电气 | 机械加工 | 液晶半导体 | 食品加工行业 | 医药行业 | 化工行业 | 教育行业 | 娱乐生活 | 其他行业
应用案例:包装码垛 | 拧螺丝 | 注塑成型 | 抛光打磨|实验室分析 | 涂胶,点胶,焊接 | 机床管理 | 拾取和放置 | 装配 | AGV | 质量检验 | 设备看护
协作机械臂高校实验室建设 优傲机器人+夹爪
协作机械臂高校实验室建设 优傲机器人+夹爪
相关技术文章




