
品牌
生产厂家厂商性质
北京市所在地
一、平台概述
无人机飞控半实物实验平台是集教学与科研目的为一体的多功能实验台,其在满足日常学生教学实验的同时,兼顾无人机飞行控制及飞行力学等学科专业的科学研究。平台主要由实时仿真机、三维飞行视景系统、地面站系统、遥控器和飞控板组成。
1、基于模型的设计思路;
4、支持PIXHAWK和APM:
❋ 支持模型预测控制、滑模变结构等复杂控制算法的直接代码生成;
5、支持硬件在回路仿真试验:
❋ 实时仿真机和飞控完成硬件闭环;
1、数学仿真实验
❋ 外部环境扰动试验 ❋ 传感器误差试验
❋ 搭建半实物仿真平台 ❋ 单轴姿态控制半实物试验 ❋ 三轴姿态控制半实物试验
3、控制器快速原型开发试验
1、固定翼三轴姿态控制数学仿真试验
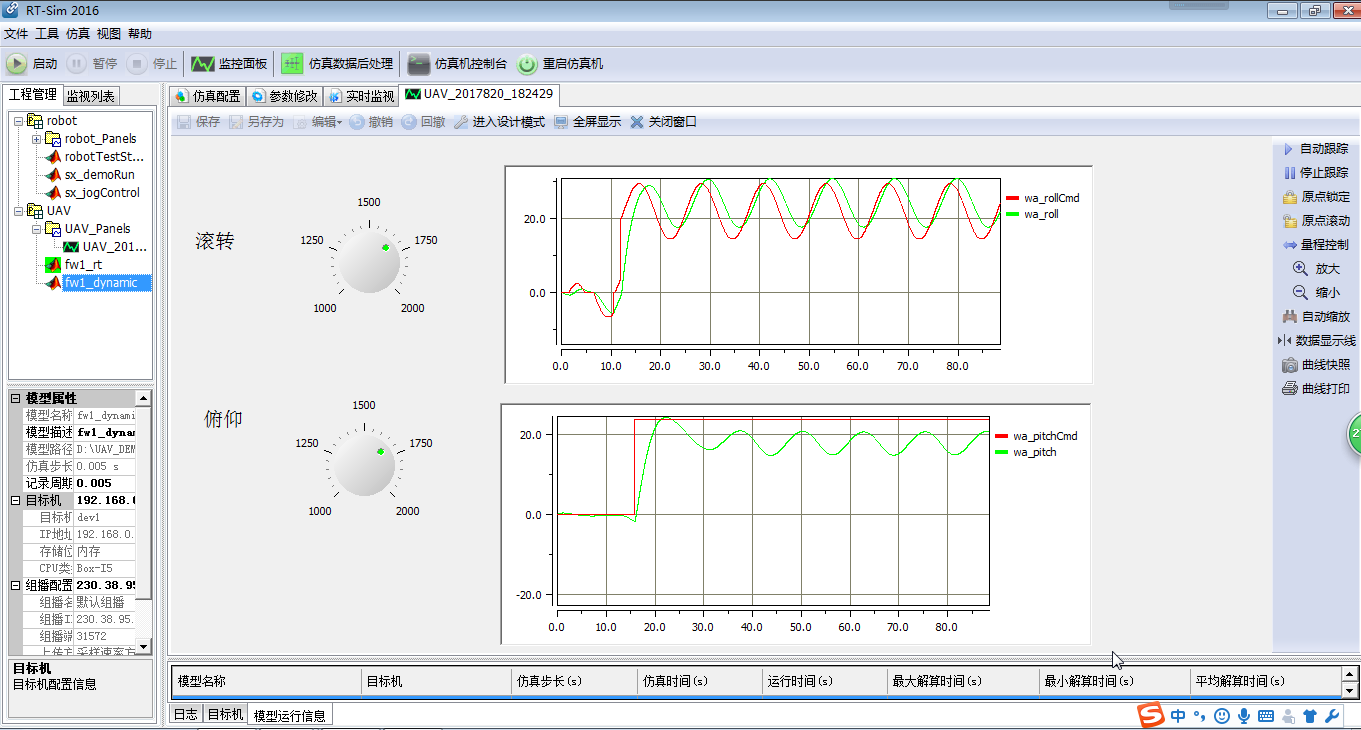
飞控算法采用双闭环PID控制结合速度前馈,其外环为角度(angle)控制,角度值是由滤波与姿态解算后得到的欧拉角,有延迟且存在误差,单闭环无法实现姿态控制过程。在此基础上引入内环,内环选择角速度(rate)控制,角速度由陀螺仪直接测量得到,误差小,响应快,延迟短。
❋ GUI界面
2、四旋翼飞控快速控制原型试验
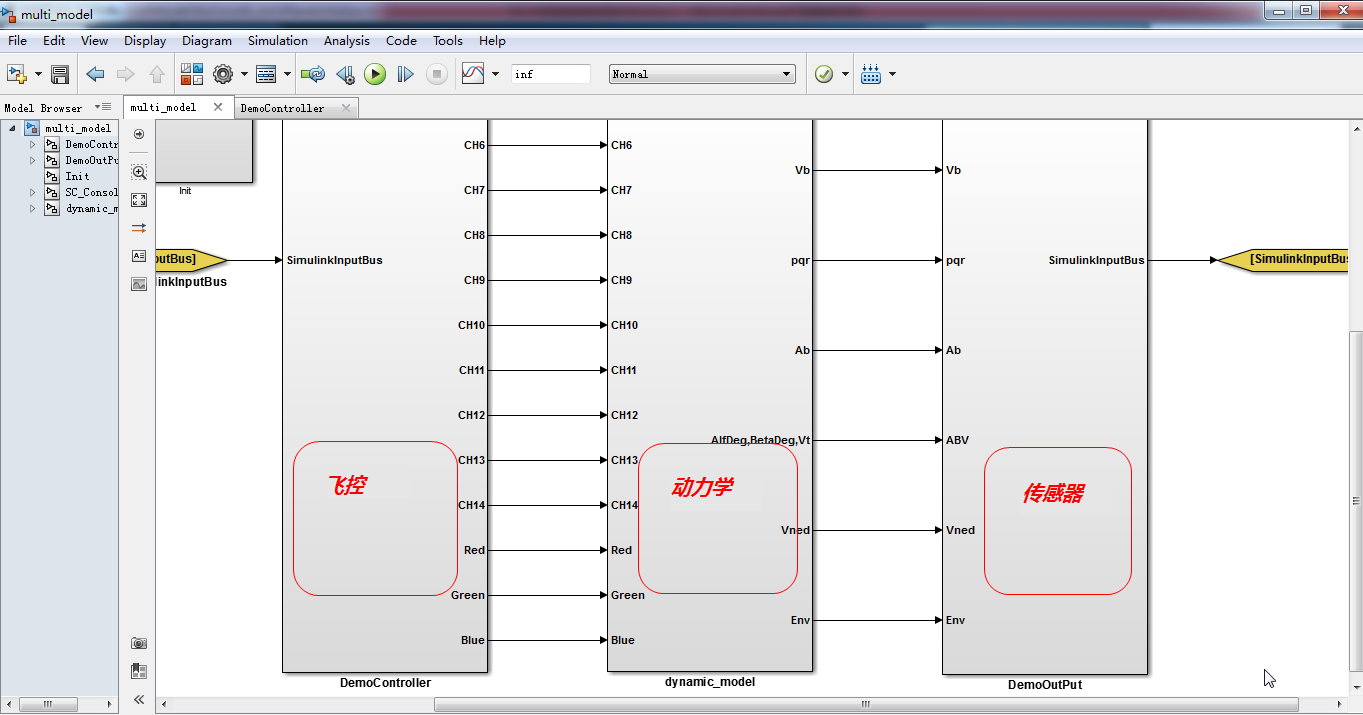
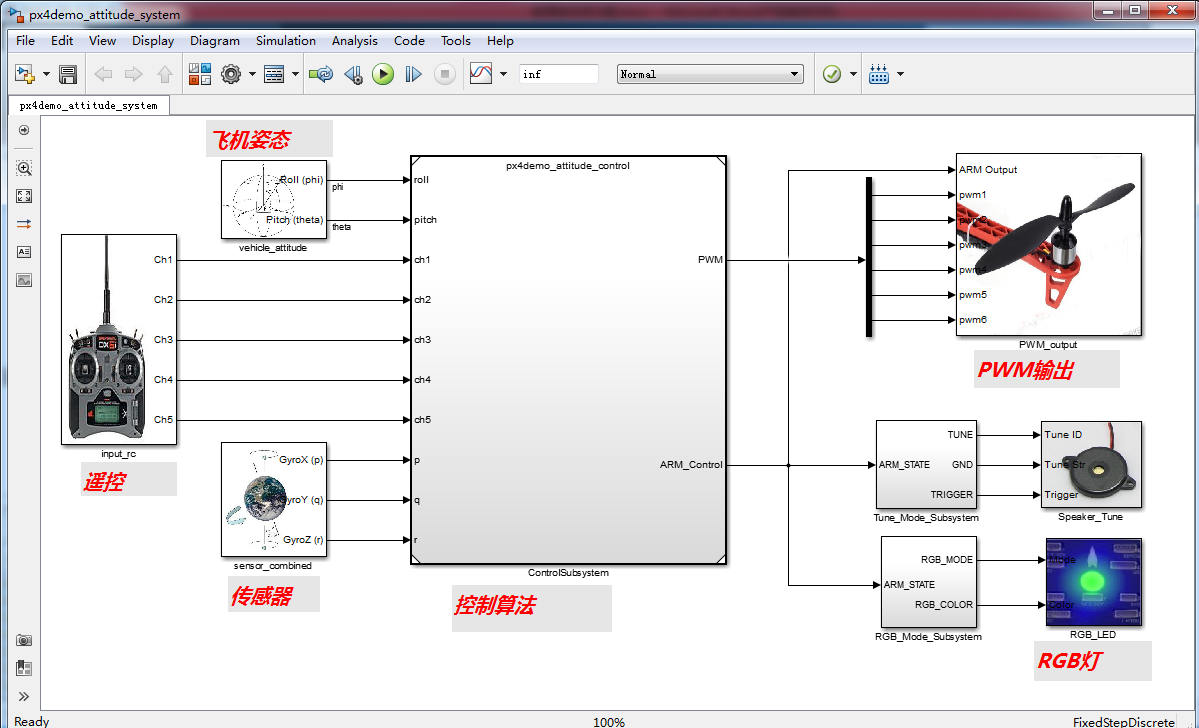
飞控快速原型模型包括控制算法和接口模块两大部分,其中用户主要负责控制算法部分,接口部分为我司提供,主要包括遥控输入、传感器和姿态输入、PWM输出等模块,接口模块匹配真实的飞控板硬件。模型建好后,经过简单配置,可以一键生成代码和可执行程序。
3、固定翼三轴姿态控制半实物仿真实验
产品名称 | 产品型号 | 系统配置 | |
无人机飞控半实物实验平台 | LINKS-RS-UAV-01 | 实时仿真机 | Links-Box-02 |
实时仿真软件包 | Links-RT | ||
电动三轴转台(选配) | Links-3Axis | ||
无人机飞控开发套件 | Links-FC | ||
六、部分用户
❋ 四川轻化工学院 ❋ 南昌航空大学 ❋ 华东交通大学 ❋ <span text-indent:24px;white-space:normal;"="" microsoft="" yahei";="" text-indent:="" 24px;="" white-space:="" normal;"="" style="box-sizing: inherit;">桂林航天工业学院









