


品牌
生产厂家厂商性质
北京市所在地
本平台以桌面级垂直串联六自由度机器人为被控对象,提供了半物理开发验证环境,在满足基本机器人示教操作的同时,可以对六自由度机器人的轨迹规划、空间插补算法、正/逆运动学解算等机器人学及其控制理论算法的本科教学提供实验支撑。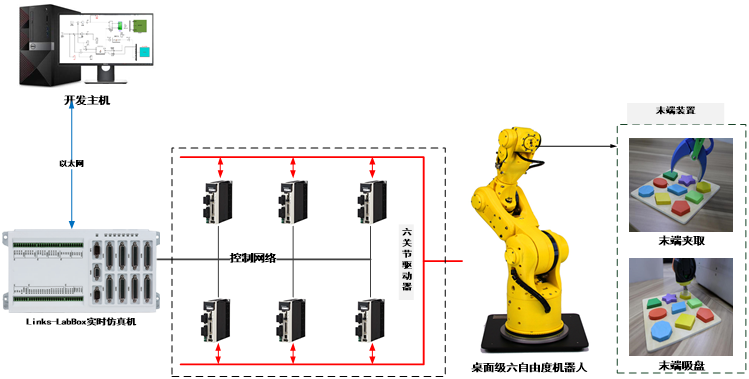
1、支持RCP快速原型设计
2、开发环境友好:
3、桌面级机器人:
4、机器人实现动作:
5、多样化的调试手段
6、开源示例
三、实验内容
❋❋机器人控制系统认识实验; ❋❋机器人坐标系建立;
❋❋❋❋四、实验示例
基于Matlab开发的六关节机器人的轨迹规划仿真软件sxTeach,为学生初步学习机器人轨迹规划和运动学正逆解算法提供了离线仿真环境。试验界面如下图所示,可以完成如下功能:
❋ 编辑运动轨迹 ❋ 轨迹规划
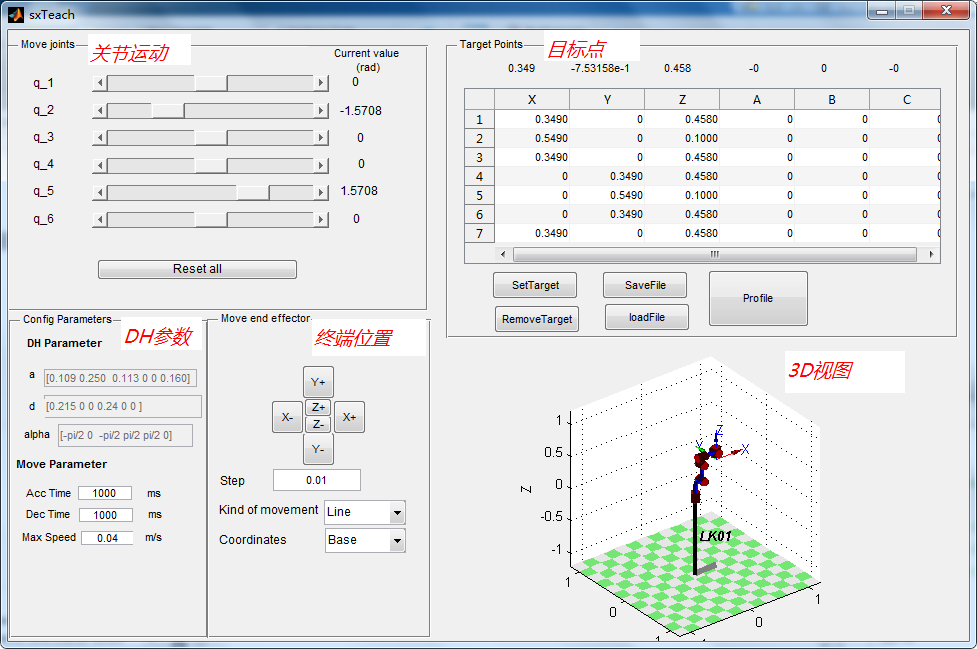
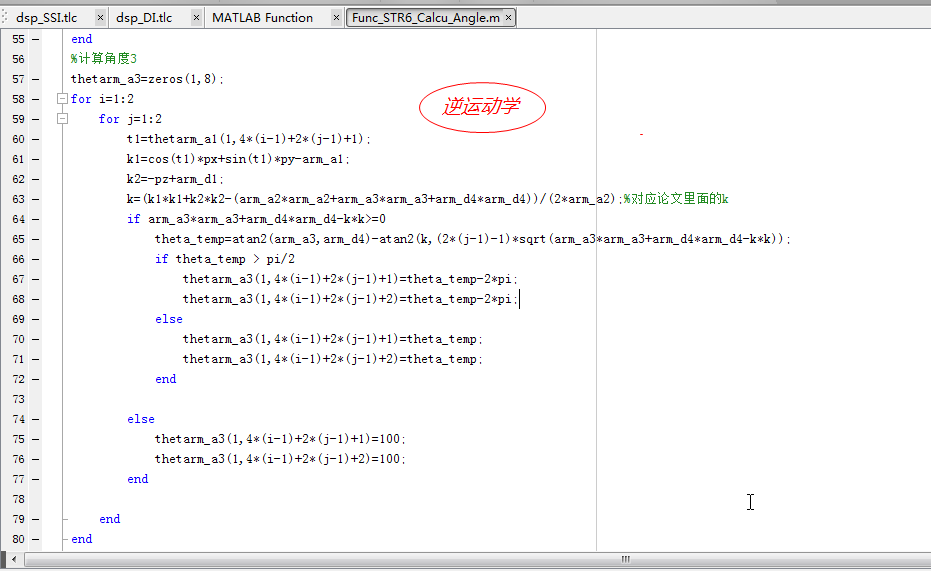
轨迹规划仿真软件sxTeach的后台运算采用M语言编写,且所有源代码均向用户开放。
在完成机器人离线仿真实验的基础上,本平台更多地是使用真实的机器人实物本体作为控制对象。用户基于Matlab Simulink可快速完成机器人控制算法的开发,经自动编译后生成VxWorks实时系统代码,后实时代码部署到实时仿真器中运行,并通过多轴运动控制卡实现对机器人各关节的控制。
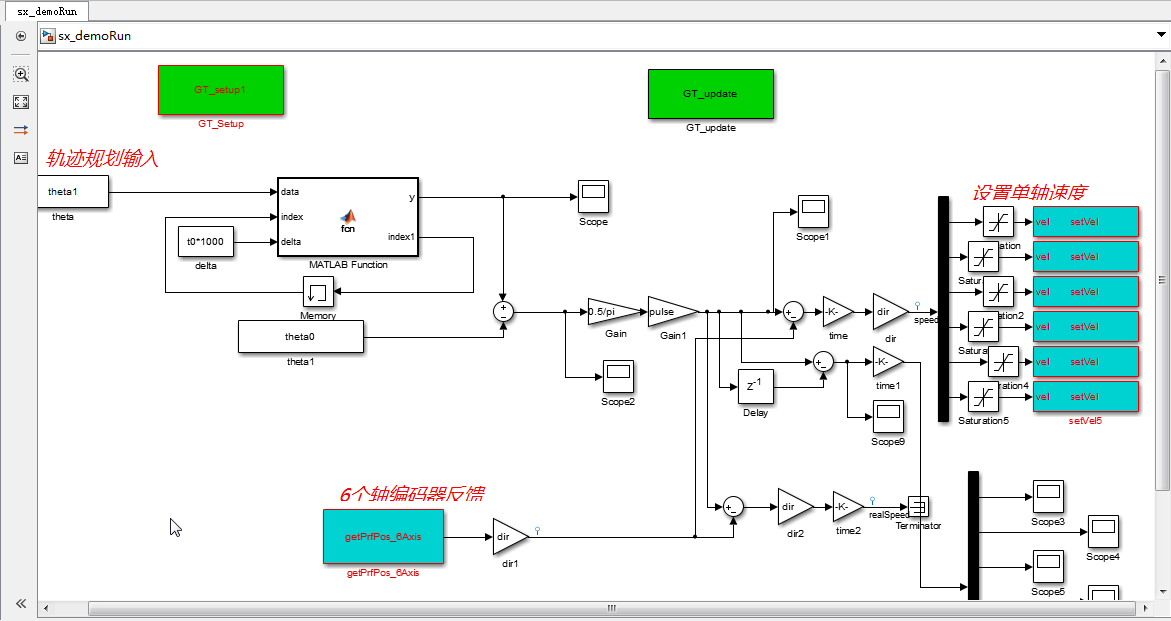
在六关节机器人控制系统模型中,我公司主要提供了控制算法示例模型和运动控制的硬件模型库。用户可基于本实验示例,任意替换机器人控制模型的各个算法模块,在无需关注底层软硬件接口实现的前提下,快速验证自己的机器人控制系统算法模型。
五、选型配置
产品名称 | 产品型号 | 系统配置 | |
桌面级六自由度机器人半实物实验平台 | LINKS-ES-6DOF-01 | 桌面级六自由度机器人 | Links-V6 Beta |
实时仿真机 | Links-LabBox | ||
实时仿真软件包 | Links-RT | ||
机器人集成实验台 | Links-LabBench | ||
北京交通大学 ❋青岛大学 洛阳师范学院 上海理工大学 ❋❋<span microsoft="" yahei";="" font-size:="" 12px;"="" font-size:14px;"="" style="box-sizing: inherit; font-size: 14px;">北京航空航天大学









