孟洋
安科瑞电气股份有限公司 上海嘉定 201801
摘要:传统霍尔电流传感器测量范围小、准确度等级低、频率范围窄、响应速度慢已不能满足实际工程的需求。为了满足核聚变领域的需求,设计了一种磁通霍尔电流传感器。基于磁通的原理和特性,为其设计了一种以脉宽调制(PWM)为核心的数字驱动电路,通过霍尔元件感应磁场,形成霍尔电压,经过放大电路、积分调节电路、PWM产生电路、功率放大电路、反馈电路,终形成二次侧的补偿电流,从而保证霍尔元件处于磁通状态。测试表明:设计的传感器的电流测量范围为±30kA,准确度等级为0.5级,频率范围可以达到20kHz,响应时间在5μs以内。
关键词:霍尔传感器;霍尔磁通电流传感器;脉冲宽度调制;积分调节;功率放大;反馈电路
0引言
作为世界上应用广泛、应用数量多传感器之一的霍尔电流传感器,具有灵敏度高、精度高、温度漂移小、工作寿命长、可靠性、性高等点[1]。基于霍尔电流传感器的以上点,考虑到一般大电流传感器不能交直流两用,准确度等级、频率范围、响应速度,也很难同时满足核聚变领域的需要。本文以闭环磁通霍尔电流传感器为基础,设计出一种用于核聚变领域的大电流霍尔传感器电路,此传感器可测交直流电流。测量范围高至±30kA,输出信号准确度等级高、频率范围宽、响应速度快,同时解决了在大电流情况下晶体管的大功耗散热和电压等级提高影响的问题,很好地满足了核聚变领域的需要。
1磁通霍尔电流传感器工作原理
1.1霍尔效应现象
具体产生的过程为:将通电的半导体材料(一般制成半导体薄片)放入磁场中,磁场的方向与电流方向夹角成90°(这时霍尔效应好)放置,这时由于导体中载流子受到洛伦兹力作用会发生偏移,在半导体薄片的两边会产生一个电压差,在电场及磁场力的作用下载流子的运动达到一个平衡状态,这一过程即为霍尔效应产生的过程,产生的电压称之为霍尔电势,霍尔电势Vh为:

(1)
式中I为通过霍尔元件的电流;B为垂直霍尔元件的磁感应强度;Kh为霍尔材料灵敏度系数。Kh=Rh/d×f(L/b),Rh为霍尔系数;L,b,d为霍尔元件的长、宽、高;f(L/b)为修正系数。
1.2工作原理
如图1所示为磁通霍尔电流传感器的工作原理。一次侧的原边电流I1在磁芯中产生的磁场B1与二次侧4边线圈中I2产生的磁场B2相平衡,从而使4个霍尔元件H始终保持磁通的工作状态。补偿电流I2的产生方式:霍尔元件在感应到磁场的不平衡后,产生霍尔电压Vh,经过比例放大和积分调节后,转换为脉宽调(pulsewidthmodulation,PWM)信号用于驱动功率放大电路,再由功率放大电路提供相应占空比大小的电压,终形成二次侧的电流I2。在整个传感器系统稳定时,一次侧和二次侧的磁场始终保持平衡,即有N1·I1=N2·I2。
考虑到使用的磁芯为正方形框体形状,磁芯上不同位置处的磁场强度有所不同。为提高系统整体精度,本传感器系统设计在磁芯的互为对称的框体四边的中点位置设置霍尔元件,共计4个霍尔元件,分别用来感受4点的磁场强度。以这4个霍尔电压大小的和来衡量磁场的不平衡量,作为系统的反馈量。
2系统硬件电路设计
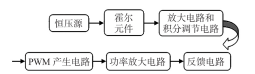
整个电流闭环传感器系统分为6个部分:1)霍尔器件供电电路,由恒压源给霍尔元件提供工作电流;2)感应电路,一次侧电流发生变化时,磁场平衡被打破,元件感应到磁场不平衡从而产生霍尔电压Vh;3)放大电路和积分调节电路,对霍尔元件产生的微弱霍尔电压信号进行放大调节;4)PWM波产生电路,放大后的霍尔信号与载波通过比较器比较,后产生三电平的PWM信号;5)功率放大电路,PWM波驱动金属氧化物半导体场效开通,形成一定占空比的电压信号,加在补偿线圈两端从而形成反馈电流;6)反馈电路,依据磁平衡原理,利用二次侧补偿线圈产生的磁场对一次侧磁场进行补偿,使气隙处始终处于磁通状态。
2.1霍尔元件
霍尔元件是组成闭环霍尔电流传感器的重要组成部分,本设计选用锑化铟为元件材料的器件HW-302B,其采用单列直插式封装形式。输入采用电压或电流两种模式供电,大输入电流为20mA,输入、输出阻抗为240~550Ω,失调电压为-7~7mV,温度系数为-1.8%/℃,输出霍尔电压范围为122~204mV。由于采用电流源模式供电,引脚1,3为控制输入端,引脚2,4为霍尔电压输出端,霍尔元件置于磁芯气隙处,能大程度地感应垂直穿过霍尔元件的磁场,得到稳定的霍尔电压。
2.2放大电路和积分调节电路
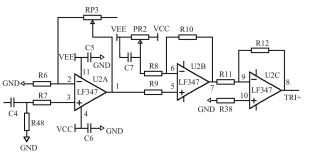
一次侧电流发生变化时,磁场平衡被打破,元件感应到磁场不平衡从而产生微弱霍尔电压Vh,由于电压很小,需要对此信号进行放大和调节,采用OPA2277高精度运算放大器。通过改变电阻值来改变放大倍数,OPA2277的1,2引脚之间跨接电阻器组成比例放大电路,6,7引脚之间跨接电阻器和电容器组成积分调节电路。本设计电路通过调节与电容器相连的可调电阻器来调整放大倍数,电路如图3所示。
2.3PWM波产生电路
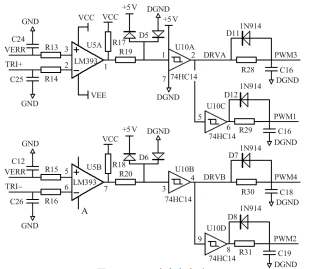
设计的PWM波产生方式是用霍尔输出放大信号与载波进行比较,产生一定占空比的三电平信号。如图4所示,为载波调节电路,通过调节LF347的1,2引脚之间的可调电阻器RP3调节载波幅值,调节与6引脚相连的RP2改变载波的偏移量,引脚7输出负载波(TRI-),引脚8输出正载波(TRI+)。
VERR与TRI+通过比较器LM393比较,比较后的信号经过处理产生PWM1和PWM3;VERR与TRI—通过比较器LM393比较,比较后的信号经过处理产生PWM2和PWM4。
2.4功率放大电路
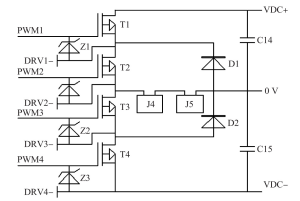
功率放大电路原理。该电路的供电电压为正负直流电压,其中VDC+,VDC-值相等,0V为0电位,功率放大电路采用正负向对称的设计。为了在引出位置(即二次侧线圈串联采样电阻)输出正向或反向的电压;4路PWM波驱动T1~T4,通过控制4个MOSFET的通断来控制引出位置的电压。具体工作原理以正向为例来说明:在需要产生正向电压时,PWM2为高电平,MOSFET管T2一直开通,对应的PWM4为低电平,MOSFET管T4一直关断。PMW1为设置好占空比的PWM波,用于控制MOSFET管T1,PMW3与PMW1为逻辑运算与非关系,此时的MOS-FET管T3的状态对电路无影响。T1开通时,电流方向:VDC+→T1→T2→引出位置→0;T1关断时,电流方向:引出位置→D1→T2→引出位置,形成续流回路;引出位置接二次侧线圈,线圈电感很大,通过控制PMW1的占空比来实现控制二次侧线圈上的补偿电流。
2.5反馈电路
闭环磁通霍尔电流传感器采用磁平衡原理,被测电流产生的磁场需要通过二次侧线圈电流进行补偿,使霍尔元件在气隙处始终处于磁通工作状态。当I1刚建立磁场,I2尚未形成时,霍尔元件检测出N1I1所产生的磁场信号,经放大电路和积分调节,转换为PWM波信号用于驱动功率放大电路,终形成对应占空比大小的电压[4]。由于补偿回路是个线圈,通过线圈电流不会突变,因此I2逐渐上升,N2I2所产生的磁场补偿了N1I1所产生的磁场,因此霍尔元件输出减小,I2上升减慢。当N2I2=N1I1时,磁场达到平衡,霍尔元件输出为,但由于线圈的影响,I2会继续上升,平衡打破(N2I2>N1I1),形成过补偿,霍尔元件输出信号会变号,输出功率放大电路使I2减小,在这种往复的过程中,气隙处的霍尔元件会处于平衡点附近振荡。
2.6霍尔元件补偿
由于半导体特性和制造工艺等原因,霍尔电流传感器在对电流测量时总是存在一定的误差。为进一步提高霍尔元件的测量精度和灵敏度,往往需要对霍尔元件进行误差补偿,其主要包括温度补偿和不等位电势补偿。
2.6.1温度补偿
由于霍尔元件是有半导体元件制成,半导体材料的电阻率、迁移率、载流子的浓度都会随温度的变化而变化,造成测量误差,因此需要温度补偿。针对温度变化导致的内阻变化,可以采用对输入或输出电路的电阻值进行补偿。
2.6.1.1输入回路补偿法
如图7所示,采用恒流源供电,并联分流电阻器R,设初始温度为T0,霍尔元件的输入电阻值为R0,霍尔电流为I0,霍尔元件灵敏度为K0,当温度上升到T时,霍尔元件的输入电阻值为R1,霍尔电流为I1,霍尔元件灵敏度为K1。
式中下标0,1分别为温度为T0和T的有关值,α为霍尔元件灵敏度温度系数,β为霍尔元件输入电阻温度系数。当温度影响带来的测量误差*补偿时,不同温度下输出的霍尔电压相等。
2.6.1.2输出回路补偿法
输出回路进行温度补偿的电路,当温度变化时,用热敏电阻值Rt的变化来抵消霍尔电势Vh和输出电阻值R0变化对输出电压的影响,从而保持输出霍尔电势与温度基本无关。
2.6.2不等位电势补偿
不等位电势是霍尔元件在加额定控制电流而外磁场为时出现的霍尔电势,称其为位电势(及漂)。在分析不等位电势时,可将霍尔元件等效为一个电桥。输入电1,3和输出电2,4可看作电桥的电阻连接点,其相互之间分布电阻值R1,R2,R3,R4构成4个桥臂,当B=0时,理想情况下Vh=0,即4个电阻值相等。如果通入额定电流,而Vh不等于0,说明4个电阻存在差异,需要添加平衡电桥电路[9]。如图8所示,通过对滑动电阻器的调节可以达到霍尔元件的电桥平衡,从而在B=0时,使输出电压Vh=0。
3测量结果及处理
3.1测量方法
1)选用的测试电源为高精度逆变电源,此电源可以输出电流为正负直流、交流,输出通过导线和负载相连,负载为一个大环形线圈,被测传感器套在大环形线圈臂上(即电源输出一个小电流用等效安匝法使电流加倍);另外高精度逆变电源输出导线上套有标准电流传感器。
2)设计传感器电路可以采集交直流信号;板卡控制电选用直流12V,功率放大电路供电电压为直流±80V。
3)将设计传感器的信号输出端与电阻器相连,电阻器另一端接到±80V电源的0V电位上。分别采集电阻两端电压信号和标准电流传感器输出电压信号。
3.2测量过程
实验在一次侧高精度逆变电源输出电流为正负直流条件下测试。接通电源使传感器系统稳定0.5h,调节高精度逆变电源,使电流输出从0A开始正向增加,每间隔5kA停顿一下,等在该点稳定后读数一次,依次顺序电流达到30kA,后退到0A;电流从0A开始负向增加,每间隔-5kA停顿一次,等在该点稳定后读数一次,依次顺序电流达到-30kA,后退到0A。特别需要注意读数时在每个电流点上保持电流稳定后读取。
3.3测量范围和准确度等级(精度)
在室温下对设计传感器进行测试,实验数据如图9。实验中用大环形线圈等效安匝法模拟了一次侧的大电流,一次侧大环形线圈绕组匝数为532,标准电流传感器匝比为100,设计传感器匝数为6000。i1为一次侧单匝导线上标准电流传感器测量值;i2为设计传感器采样电流;I1为一次侧的换算电流,I1=532100i1;I2为二次侧的换算电流,I2=6000i2;δ为相对误差,
其中,X为设计传感器的示值,XS为标准传感器示值。表中7组数据为电流时各传感器的输出值(即漂值)。
从图中可以看出:大电流达到了±30kA;大相对误差为0.44%,出现在实验中电流小的点,且明显有电流较小时相对误差大的情况。造成这种情况的原因是,点漂移得不够,数据较小时,采集测量的点漂移影响了传感器的准确度等级,但整体准确度等级达到了0.5级(精度为0.5%)。传统传感器测量范围在±10kA以下,即使范围能到达±30kA的准确度等级为1.0级。
3.4频率范围
设计电流传感器和标准电流传感器输出接示波器,调节高精度逆变电源使电源每次输出交流电流为值40A(大环形线圈上产生等效值约为21.3kA的电流),每次测试改变频率。经过测试,观察待测电流传感器的输出信号波形,当高精度逆变电源输出电流频率为20kHz时,设计电流传感器采到的输出频率为20.08kHz,值为3.52V(探头衰减10倍,显示为0.352V)。经过计算,输入输出电流基本保持相等,说明此频率下输出信号的幅频特性较好。当高精度逆变电源输出电流频率继续增加,设计电流传感器采到的输出电压值明显减小,说明传感器跟踪失败,输出信号幅频特性变差;但比传统同类型±30kA大电流传感器(频率范围1kHz)有很大的提高。
3.5响应时间
指一次侧电流为高频交流或充电机暂态放电电流时,设计电流传感器采到电流的时刻与标准电流传感器采到电流时刻的时间差,定义为响应时间。由于本传感器设计的频率范围为20kHz,所以把高精度逆变电源输出波形频率设为20kHz条件下,经过多次测试得出一组时间差值,计算平均值得到反应时间小于5μs。
4安科瑞霍尔传感器产品选型
4.1产品介绍
霍尔电流传感器主要适用于交流、直流、脉冲等复杂信号的隔离转换,通过霍尔效应原理使变换后的信号能够直接被AD、DSP、PLC、二次仪表等各种采集装置直接采集和接受,响应时间快,电流测量范围宽精度高,过载能力强,线性好,抗干扰能力强。适用于电流监控及电池应用、逆变电源及太阳能电源管理系统、直流屏及直流马达驱动、电镀、焊接应用、变频器,UPS伺服控制等系统电流信号采集和反馈控制。
5结束语
本文设计了一种测量范围大、准确度等级高、频率范围宽、响应快的传感器。经过测试,此电流传感器测量范围达到±30kA,准确度等级到达0.5级,频率范围到达20kHz,反响时间小于5μs,并解决了在大电流情况下,晶体管的大功耗散热和电压等级提高影响的问题,此传感器可以广泛应用于核聚变领域。
【参考文献】
[1]武旭,王林森,居鹏.闭环霍尔电流传感器的硬件电路设计
[2]程兴,但强,孙珍军.一种新型闭环式双铁芯霍尔电流传感器的建模与实现[J].传感器与微系统,2013,31(7):12-18.
[3]安科瑞企业微电网设计与应用手册2020.06版





 留言
留言